一、創建並編譯功能包
1.1 創建功能包
在工作空間的 src 目錄下創建功能包:
$ cd ~/dev/catkin_ws/src
$ catkin_create_pkg chapter2_tutorials std_msgs roscpp
1.2 編譯功能包
進入工作目錄下編譯全部功能包:
$ cd ~/dev/catkin_ws/
$ catkin_make
如果到達100%,表示一切順利,否則會報錯停止編譯。
二、創建並編譯節點
2.1 創建節點
進入功能包的 src 目錄下,在這個文件夾中,創建兩個新文件:example1_a.cpp 和 example1_b.cpp。
example1_a.cpp(發布節點):
#include "ros/ros.h" //"ros/ros.h"包含ROS節點所有節點的必要文件
#include "std_msgs/String.h" //"std_msgs/String.h"包含消息類型
#include <sstream>
int main(int argc, char **argv)
{
ros::init(argc, argv, "example1_a"); //啟動該節點並設置其名稱(example1_a),該名稱是唯一的
ros::NodeHandle n; //設置節點進程的句柄
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("message", 1000); //把這個節點設置成發布者,並把發布主題的類型告訴節點管理器。第一個參數是消息名稱“message”,第二個參數將緩沖區設置為1000個消息
ros::Rate loop_rate(10); //設置頻率10Hz
while (ros::ok()) //一直運行,直到CTRL+C停止運行
{
std_msgs::String msg; //創建消息變量,變量類型必須符合發送的要求
std::stringstream ss;
ss << " I am the example1_a node "; //要發布的消息內容
msg.data = ss.str();
chatter_pub.publish(msg); //發布消息
ros::spinOnce(); //如果出現訂閱者,ROS會更新和讀取所有主題
loop_rate.sleep(); //按頻率掛起
}
return 0;
}
example1_b.cpp(訂閱節點):
#include "ros/ros.h"
#include "std_msgs/String.h"
/*接收消息然后發布*/
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
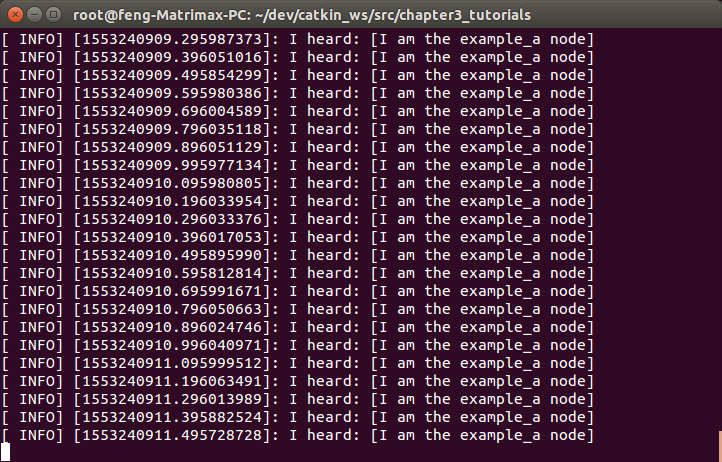
ROS_INFO("I heard: [%s]", msg->data.c_str()); //在命令行窗口顯示消息內容
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "example1_b");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("message", 1000, chatterCallback); //創建一個訂閱者,從主題獲取以“message”為名稱的消息,緩沖區為1000,處理消息句柄的回調函數chatterCallback
ros::spin(); //ros::spin()庫是響應循環,消息到達時調用函數chatterCallback,CTRL+C結束循環
return 0;
}
2.2 編譯節點
將下列幾行代碼添加到CMakeLists.txt文件中include_directories(include ${catkin_INCLUDE_DIRS})之后:
add_executable(chap2_example1_a src/example1_a.cpp)
add_executable(chap2_example1_b src/example1_b.cpp)
add_dependencies(chap2_example1_a chapter2_tutorials_generate_messages_cpp)
add_dependencies(chap2_example1_b chapter2_tutorials_generate_messages_cpp)
target_link_libraries(chap2_example1_a ${catkin_LIBRARIES})
target_link_libraries(chap2_example1_b ${catkin_LIBRARIES})
回到工作目錄下,編譯功能包:
$ cd ~/dev/catkin_ws/
$ catkin_make chapter2_tutorials
如果順利編譯的話,將會生成兩個可執行程序 example1_a 和 example1_b 文件,默認生成可執行文件的目錄是catkin工作空間的devel目錄下的lib目錄。
3 檢驗編寫的節點
首先要確認在carkin_make之后加載了工作空間的環境變量,然后分別在三個新的終端運行如下命令:
$ roscore
$ rosrun chapter2_tutorials chap2_example1_a
$ rosrun chapter2_tutorials chap2_example1_b
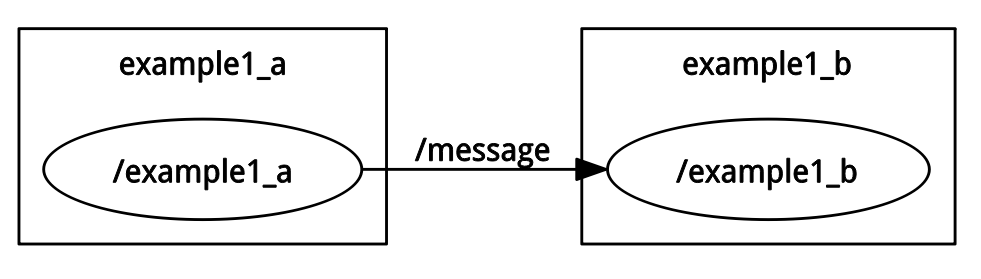
使用rqt_graph命令能夠創建一個顯示當前系統運行情況的動態圖形,如下圖所示。example1_a 節點發布 /message 主題,同時 example1_b 節點訂閱了這個主題。